


Atualmente, podemos dizer que quase todos os especialistas e entusiastas em sistema embarcados certamente já tiveram algum contato com plataformas Arduino, e quem se familiarizou com as diversas bibliotecas e ferramentas gratuitas, provavelmente teve algum apego a simplicidade oferecida pelos parâmetros de programação do mesmo. O objetivo dessa postagem será a apresentação introdutória da placa STM32, que será uma excelente alternativa para aqueles quedesejam trabalhar com microcontroladores mais ágeis e precisos sem sair do conforto oferecido pela IDE do Arduino.
Para concluir as atividades desse post, tenha em mãos os seguintes componentes:
- Placa ARM STM32 - STM32F103C8T6;
- Led Alto Brilho Azul, vemelho e verde - 5mm;
- Resistor 1K - 1/4W - 5%;
- Kit Jumper Macho Macho;
- Protoboard 400 Pontos;
- Gravador STM8 STM32- ST- Link V2 Mini;
- Sensor de Luz Ultravioleta UV ML8511;
- Potenciômetro Linear 1K-L20.
Você pode compra-los clicando nos links acima ou visitando nosso site: www.curtocircuito.com.br.
Apelidado como Blue Pill em fóruns de programação como o STM32duino, este sistema baseia-se em microcontroladores STM32F103, desenvolvidos pela empresa STMicroeletrics. A placa de prototipagem STM32 apresenta-se como uma ferramenta inovadora para aqueles que desejam obter um melhor desempenho em seus projetos, afinal, tal dispositivo dispõe de um processador de 32 bits com arquitetura Cortex-M3 ARM, uma das melhores ferramentas de execução em Real-Time, além de operar a 72Mhz, com duas configurações de núcleo, sendo como padrão comum 64 Kb de memória Flash, e 128 Kb testados virtualmente em versões C8.
Esse componente passou a ganhar fama, principalmente, pela possibilidade de atuar como um Arduino, sendo em muitos artigos comparado a modelos como Nano, além de apresente vantagens como processamento, maior quantidade de portas analógicas, e possuir um valor de mercado relativamente mais baixo. Para expressar melhor tais diferenças, observe a tabela apresentada abaixo, onde realizaremos uma breve comparação entre os sistemas operacionais de um STM32 e alguns dos modelos mais comuns de placas Arduino.

Embora não seja tão popular quanto as placas da família Arduino, o Blue Pill oferece uma maior vantagem, tanto no quesito de potência quanto no aprendizado. Além dos parâmetros apresentados acima, podemos citar também alguns pontos interessantes, como os dois cristais osciladores presente no STM32, um com 8MHz e outro de 32MHz, que poderão ser utilizados para acionar o RTC (Real Time Clock) interno, possibilitando a aplicação de modos de operação econômicos, permitindo que a placa entre em sono profundo (Deep Sleep).
Pinagem
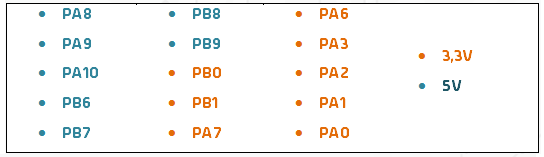
O microcontrolador em si atua com apenas 3,3V, porém, a placa possui um regulador de tensão IC para permitir que alguns dos pinos GPIO comporte valores de até 5V. Analisando a pinagem de um STM32, podemos encontrar 33 portas GPIO, que variam sua tolerância entre 3,3V e 5V, além 3 canais SPI e I2S, 10 leitores ADC de 12 bits, 3 USART e 15 pinos PWM. No diagrama abaixo, será apresentado um breve resumo das funções presentes na pinagem de um Blue Pill.

Os valores destacados em amarelo, denominados na legenda como "Pin Name", serão utilizados para declarar os pinos em programações via Arduino IDE. Por exemplo, para declarar um LED conectado ao pino 2 (PC13) , o programador deverá escrever : pinMode(PC13, OUTPUT);
![]()
Procure analisar bem a legenda antes de conectar qualquer componente, afinal, alguns pinos como o próprio PC13, não toleram valores acima de 3,3V, além de apresentar outras características exclusivas.
STM32 na IDE do Arduino
O Blue Pill poderá ser programado em outras opções de plataformas como PlatformIO, Eclipce, porém, o software de programação oferecido pela empresa Arduino possui uma comunidade forte, que dissemina múltiplos materiais de auxilio e bibliotecas que facilitam o desenvolvimento com STM32. A ide de programação estará disponível gratuitamente no site oficial Arduino.cc.
Para compilar quaisquer programações em um microcontrolador via Arduino IDE, será necessário selecionar um dos modelos de placas compatíveis com software, no caso de placas STM32 e similares, será preciso adicionar um novo conjunto nas opções de gerenciamento de placas, portanto, acesse o menu Arquivo >> Preferências>> URLs Adicionais para Gerenciamento de Placas, adicione o seguinte endereço:
http://dan.drown.org/stm32duino/package_STM32duino_index.json

Em seguida abra o menu Ferramentas >> Placa >> Gerenciador de Placas. Na barra de pesquisa, escreva STM32F1xx e instale a versão mais recente do conjunto.

Compilando Programações sem Bootloader no ST-Link

Conecte o ST-Link ao computador, vá ao software de programação e clique em Arquivos >> Exemplos >> Básicos >> Blynk. Substitua as variáveis "LED_BUILTIN" pelo valor escrito ao lado do LED verde (ou azul), que na maioria dos casos será "PC13", como algumas placas STM32 costumam vir com este mesmo programa instalado, troque os valores de delay por algo como 1000 e 100, ou 1000 e 500, apenas para que o piscar do LED siga um ritmo diferente do padrão.
/* Projeto Curto Circuito – Blynk Blue Pill (STM32) */
void setup()
{
/* PC13, LED embutido na própria placa */
pinMode(PC13, OUTPUT);
}
void loop()
{
digitalWrite(PC13, HIGH); /* LED conectado ao PC13 Liga */
delay(1000); /* Aguarda 1 segundo */
digitalWrite(PC13, LOW); /* LED conectado ao PC13 Desliga */
delay(500); /* Aguarda meio segundo */
}
Ajuste as configurações da placa no menu Ferramentas, como mostra a imagem abaixo. Normalmente, selecionamos uma COM correspondente ao componente na opção Porta, no entanto, o ST-Link não será reconhecido pela IDE do Arduino, mas isso não será um problema, a programação poderá ser transferida normalmente desde que a opção Upload method esteja ajustada como "STLink".

Após compilar o código, observe que o LED PC13, embutido na própria placa, deverá piscar de acordo com os valores especificados na programação. Qualquer programação poderá ser compilada dessa forma, porém, vale destacar que com esse método não será possível utilizar ferramentas como o Plotter/Monitor Serial da IDE do Arduino.

Para auxiliar no desenvolvimento de futuros projetos, clique em Sketch >> Incluir Biblioteca >> Gerenciar Bibliotecas. Escreva “STM32” na barra de pesquisa do gerenciador, e procure adicionar ao menos um conjunto de exemplos, que poderão simplificar a construção de funções e lógicas voltadas ao STM32.

Mapple Mini: Bootloader e Comunicação USB
Como foi dito anteriormente, para habilitar a comunicação USB será necessário instalar um bootloader compatível no STM32, que poderá ser facilmente encontrado no Github STM32duino, criado por Roger Clark. Se o LED embutido na placa estiver conectado no pino PC13, baixe apenas o arquivo "generic_boot20_pc13.bin". O bootloader será instalado através de duas ferramentas, o STSW-LINK009, disponível gratuitamente, com os drives para placas STM32 e derivações ST-LINK / V2 e ST-LINK / V2-1, e o utilitário STSW-LINK004, aplicado a leitura, verificação e gravação do dispositivo. O download encontra-se disponível gratuitamente, exigindo apenas um pequeno cadastro com o nome e e-mail dos usuários. Nos arquivos STSW-LINK009, instale o aplicativo x86 ou amd64, obtendo um resultado similar ao apresentado a seguir.

Após intalar os drivers, conecte a placa STM32 ao computador através do gravador ST-Link, abra STSW-LINK004, instale e execute a ferramenta STM32 ST-LINK Utility. Clique no menu File >> Open Files, e procure pelo bootloader que deseja instalar, que no caso, será documento ".bin" baixado anteriormente. Para que o STM possa se conectar ao software, coloque o plug BOOT 0 na posição 1 como mostra o exemplo abaixo.

Clique em Target >> Connect, para conectar-se, em seguida retorne em Target >> Program, e inicie a gravação do bootloader na memória flash do STM32.

Com o termino do procedimento, desconecte a placa e retorne o plug BOOT 0 a posição 0. Acesse o GitHub e baixe os arquivos Arduino_STM32, cuja função será instalar o restante dos drivers necessários, fornecendo uma COM ao conectar-se diretamente via USB. Após extrair o conteúdo, acesse a pasta drivers e procure pelos aplicativos install_drivers e install_STM_COM_drivers, execute ambos e reinicie a IDE do Arduino. Agora, sempre que conectar o STM32 pelo USB, será apresentado um endereço para a comunicação serial.

Para testar o funcionamento da transmissão de informações pela porta USB, iremos propor uma programação simples, acionando componentes através de comandos enviados pela ferramenta monitor serial da IDE do Arduino. Na construção do circuito elétrico, conecte LEDs aos terminais PC15, PC14 e PC13.

/* Projeto Curto Circuito – ETM32: Monitor Serial */
/* Variáveis para o controle dos LEDs */
int LED = PC13;
int LED2 = PC14;
int LED3 = PC15;
/* Variáveis Lógicas */
int st1 = 0;
int st2 = 0;
int st3 = 0;
void setup()
{
/* Declara a pinagem dos LEDs como OUTPUT */
pinMode(LED, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
/* Ajusta a comunicação em 9600 dbs */
Serial.begin(9600);
}
void loop()
{
char choice = Serial.read(); /* Lê os caracteres escritos no monitor serial */
if (choice == '1')
{ /* Se receber 1 */
st1 = !st1; /* Troca o valor atual de st1(variando entre 0 e 1) */
if (st1 == 1)
{/* Se o valor de st1 for 1 */
digitalWrite(LED, HIGH); /* Liga o LED */
Serial.println("LED ON");
}
else
{/* Se o valor de st1 for 0 */
digitalWrite(LED, LOW); /* Desliga o LED */
Serial.println("LED OFF");
}
}
if (choice == '2')
{ /* Se receber 2 */
st2 = !st2;/* Troca o valor atual de st2(variando entre 0 e 1)*/
if (st2 == 1)
{/* Se o valor de st2 for 1 */
digitalWrite(LED2, HIGH); /* Liga o LED */
Serial.println("LED2 ON");
}
else
{/* Se o valor de st2 for 0 */
digitalWrite(LED2, LOW); /* Desliga o LED */
Serial.println("LED2 OFF");
}
}
if (choice == '3')
{ /* Se receber 3 */
st3 = !st3;/* Troca o valor atual de st3(variando entre 0 e 1) */
if (st3 == 1)
{/* Se o valor de st3 for 1 */
digitalWrite(LED3, HIGH); /* Liga o LED */
Serial.println("LED3 ON");
}
else
{/* Se o valor de st3 for 0 */
digitalWrite(LED3, LOW); /* Desliga o LED */
Serial.println("LED3 OFF");
}
}
}
ADC – Leitura Analógica
Conhecidos como Conversores Analógicos para Digitais, este tipo de recurso possibilita a leitura de valores analógicos presente em diversos tipos de sensores e componentes. Diferente do padrão encontrado nos modelos populares de Arduino, com terminais ADC de 10 bits e um intevalo entre 0 e 5V, os canais analógicos disponíveis no STM32 operam com 12 bits e tensão de entrada de 0 á 3,3V. A taxa de bits aplicada a cada terminal implica diretamente na resolução da leitura, que poderá ser calculado de forma simples, por exemplo, temos 12 bits, em outras palavras dois elevado a doze (2¹²) , que resulta em 4096, ou seja, a faixa de leitura dos terminais analógicas será de 0 á 4095.
Trabalhar com qualquer um dos 10 pinos ADC será exatamente igual ao procedimento utilizado em placas Arduino, realizando leituras e controle por meio de funções como analogRead e analogWrite. o único diferencial será observado ao declarar a pinagem, que ao invés de utilizar termos como A0 ou B0, será declarado como PA0 ou PB0.

Para testar o funcionamento dos conversores ADC, transfira a programação a seguir, onde iremos aplicar os valores de leitura de um potenciômetro ao controle do delay de um LED, imprimindo os valores obtidos no monitor serial.
/* Projeto Curto Circuito – ETM32: Leitura Analógica */
int analogPin = PA0; /* Declara PA0 para a leitura analógica */
int sensor = 0; /* Variavel para armazenar a leitura do sensor */
int LED = PC13; /* LED conectado ao pino PC13 */
void setup()
{
pinMode(sensor, INPUT);
pinMode(LED, OUTPUT);
Serial.begin(9600);
}
void loop()
{
sensor = analogRead(analogPin); /*Armazena os valores de leiuta de analogPin */
Serial.println(sensor);
digitalWrite(LED, HIGH); /* LED Liga */
delay(sensor); /* O delay será igual ao valor de sensor */
digitalWrite(LED, LOW); /* LED Desliga */
delay(sensor);
}Na construção do circuito referente a atividade proposta, adicione um potenciômetro linear de 1K, conectando o terminal no meio do componente ao pino PA0, os demais terminais nos pinos GND e 3,3 V do Protoboard, e um LED ao pino PC13.

O potenciômetro será utilizado para ajustar a faixa de leitura do pino PA0 entre 0 á 4095. O comando analogRead terá a função de obter os valores do terminal analógico, armazenando-os na variável "sensor", que será aplicado ao delay, resultando em períodos de tempo distintos entre o piscar do LED.
Controle PWM
Sinais analógicos variam continuamente, sendo por muitas vezes difícil definir seu valor real, enquanto os sinais digitais possuem uma variação mais previsível, alternando entre dois níveis lógicos, ligado (0) e desligado (1). O controle PWM (Modulação de Largura de Pulso) é uma técnica adotada por muitos Microcontroladores, por ser uma forma eficiente de controlar sinais analógicos digitalmente. Este tipo de controle encontra-se em 15 terminais, operando com resolução de 16 bits (0 á 65535), e a tensão de entrada máxima variando entre 3,3 V e 5 V de acordo com o terminal.
O PWM será responsável por codificar sinais, onde uma onda quadrada será modulada para receber a leitura analógica tornando-a digital, e por fim ajustando-a de acordo com a amplitude desejada. Na figura abaixo, serão apresentados 3 sinais analógicos codificados a 10%, 50% e 90%, ajustando a intensidade de um LED de acordo com o pulso gerado.

Para testar o funcionamento de um terminal PWM, transfira a programação a seguir, onde a leitura analógica de um potenciômetro será aplicada ao controle da luminosidade de um LED.
/* Projeto Curto Circuito – ETM32: Controle PWM */
const int analog = PA0; /* Terminal Analógico para o Potenciômetro */
const int pwm = PB9; /* PWM para controlar a luminosidade do LED */
/* Variáveis lógicas */
int sensorValue = 0; /* Armazena os valores de leitura do Potenciômetro */
int outputValue = 0; /* Valor de saída para o PWM */
void setup()
{
/* Configura o pino ADC como INPUT */
pinMode(analog, INPUT);
/* Configura o pino do LED como PWM */
pinMode(pwm, PWM);
}
void loop()
{
/* Lê o potênciometro e armazena na variável */
sensorValue = analogRead(analog);
/* Mapeia o valor de leitura */
outputValue = map(sensorValue, 0, 4095, 0, 65535);
/* Adiciona o valor analógico ao PWM */
pwmWrite(pwm, outputValue);
}O circuito será similar ao utilizado anteriormente, trocando apenas o terminal de comunicação do LED para o PB9, que será um terminal PWM capaz de codificar os valores enviados pelo potenciômetro PA0, ajustando a luminosidade de acordo com o sinal recebido.

O comando pwmWriteserá responsável por aplicar uma onda quadrada constante ao LED, com um ciclo de operação específico, que no caso, será atribuído a variável outputValue. O valor de tal variável será obtido de acordo com o mapeamento dos valores de leitura obtidos pelo potenciômetro em "sensorValue".
outputValue = map(sensorValue, 0, 4095, 0, 65535);
A função map irá avaliar os valores armazenados na variável "sensorValue", mapeando a leitura de acordo com os intervalos determinados, que foram divididos em quatro valores, 0(mínimo_in), 4095 (máximo_in), 0 (mínimo_out), 65535 (máximo_out), sendo eles separados entre valores de entrada (in), correspondendo a resolução de leitura dos pinos ADC ( 0 a 4095), e valores de saída (out), com a amostragem dos pinos PWM (0 a 65535).
A lógica matemática por trás da função map será apresentada na imagem a seguir, onde "x" será um valor de referência a ser mapeado, e os demais valores serão os limites.

Suponha que a leitura em sensorValue seja igual a 200, se aplicarmos a fórmula apresentada acima teremos: return( 200 - 0) * (65535 - 0) / (4095 - 0) + 0 = 3200, esse valor aplicado a uma simples regra de três representaria a porcentagem do sinal de acordo com o valor máximo da lógica (65535), que resultaria em aproximadamente 4%.

Considerações Finais
O STM32 apresenta-se como uma opção completa para aqueles que desejam obter um melhor desempenho, sem abandonar as inúmeras vantagens oferecidas pela plataforma de desenvolvimento da empresa Arduino. Este pequeno componente, comparado em muitos fóruns com os modelos Nano e UNO, apresenta inúmeros atrativos como o núcleo de processamento ARM Cortex-M3 com taxa de Clock de 24 á 72 MHz, fornecendo um grande aumento na velocidade da CPU, além de memórias Flash e RAM com o dobro da capacidade fornecida pelos seus concorrentes, por um preço consideravelmente menor. Quem simpatiza com a família Arduino, certamente irá se apaixonar pelo desempenho eficiente fornecido pela Blue Pill.
Gostou do tutorial? Curta nossa página e compartilhe! Conhecimento bom é conhecimento compartilhado!